
Hello!
Quick announcement up top: I’m in two shows. One is Plus One at Bromfield, which actually started last week and runs through the end of the month. The idea for this show is that each participating Bromfield artist has invited one guest artist to participate in the show and I’m very happy to have Cicely Carew as my +1. The second is the Members Prize Show at Cambridge Art Association, where I’m pleased to be showing my 2023 painting Directions for Making Birthday Party Invitations, which took me like three attempts to get satisfactory photos of, but that effort seems to have paid off. I’ve had stretch of what seems like four or five years getting rejected from the Members Prize Show at CAA, so it’s nice to get back in one.
Directions for Making Birthday Party Invitations
60 x 48
Acrylic, collage, and marker on canvas
2023
Been a while since I did a studio update. Lot’s of stuff in the works or freshly complete.
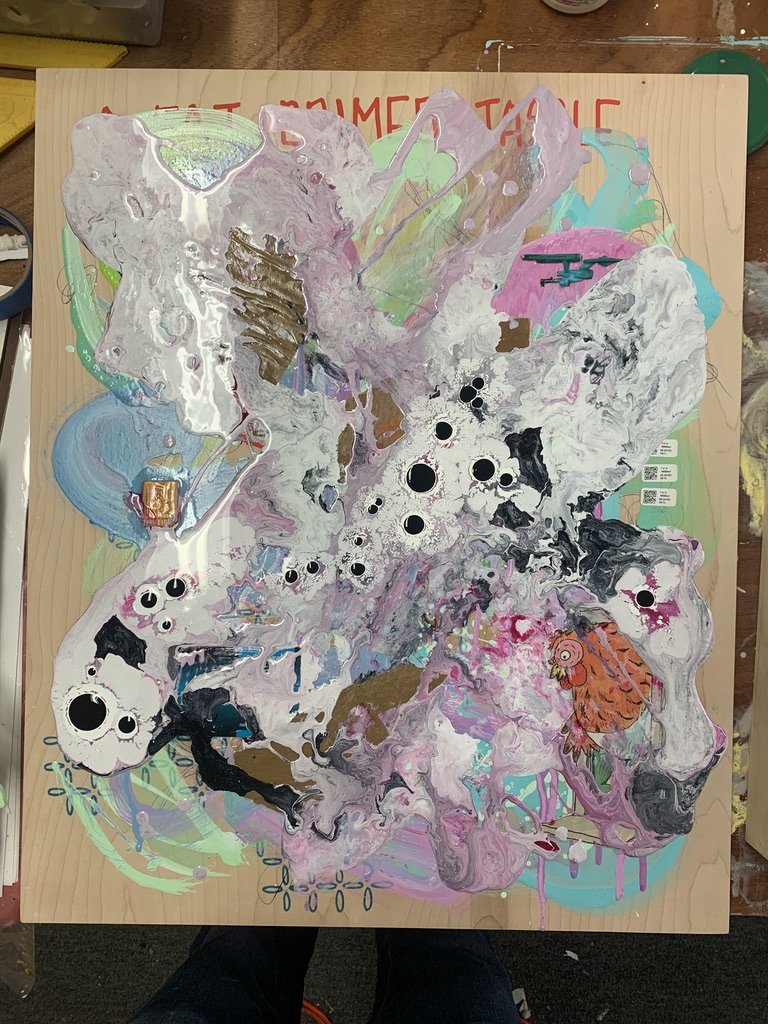
I did finish this painting, which I had in my mind as the last one that I would finish before moving on to paintings with motors in them. It’s called “The Things We Wish We’d Made Time For” or something like that. I’ve got the title on a sticky note next to it hanging on my studio wall, but I’m not in my studio at the moment:

The Things We Wish We’d Made Time For
40 x 30 inches acrylic, marker, and collage on wood panel
So how’s the motor project going? Good! My goal for this has been to have a set of paintings which “incorporate movement” ready to show for my solo show at Bromfield coming up in May. Working with Cicely for the Plus One show at Bromfield, she wanted to show a piece that incorporated digital collage and light-boxing and I was like, I’ve got this weird techno-adjacent project I’m working on too, so she encouraged me to put my “prototype” painting into the show and I did!
The Busy Day
16 x 12 inches
acrylic, marker, collage, and electronics on wood panel
2024
This little painting starts moving when someone is looking at it. When no one is looking the little arm goes back to its starting position. If you watch it long enough the little arm swings all the way up past the top of its arc and then all the way back down, then it goes the other way a little bit, then starts climbing again. It has a Raspberry Pi 4 computer mounted on the back, with a camera, stepper motor driver, and a stepper motor. The Pi is doing face detection (not face recognition) to tell if there is anyone there. When there is no face present motor power is cut, keeping the thing from consuming too much power and heating up. It also provides the “zeroing” functionality. The weight of the arm is enough that it will always generally point down when motor power is cut, so every time power is cut the program resets the step count.

All the junk on the back of the painting. The Raspberry Pi 4 is up top in a High Pi enclosure. The camera is the thing attached to the grey ribbon cable coming out the bottom of the Pi. The stepper motor is to the right, the square with the silver and blue circle in the middle of it. The little green PCB in the lower middle is a Tic stepper motor controller from Pololu, a great stepper controller with a great interface that works well in Python. The tiny blue PCB is a USB-C power delivery dummy that tells a USB C power supply to output 15V (if available). The two black blocks connected to the extension cord on the bottom are Amazon Basics USB-C 30W power supplies.
The reception has been good! I actually took Tally to the opening (he loved the current exhibit up at the Mass Art gallery, go check that out if you’ve ever wondered what Meow Wolf would be like if it were farm themed) and got some good impressions of how people were taking in the work and have heard good reports since then. The piece actually needed an intervention after it was first installed. It overheated on the first day, so I put in better rubber feet on the back of the painting to provide more of an air gap and I took the top off the High Pi enclosure.
I’m very happy because this setup is very Lego-like in its implementation. I can sort of arbitrarily add motors and control them individually, and I’ve successfully duplicated the software setup on other Raspberry Pis. The face detection only works from about eight feet back, but that’s kind of works. I need to fiddle with it a bit to see if I can get that to go to maybe 12 feet. I think it would be nice if these things could grab your attention from across the room.
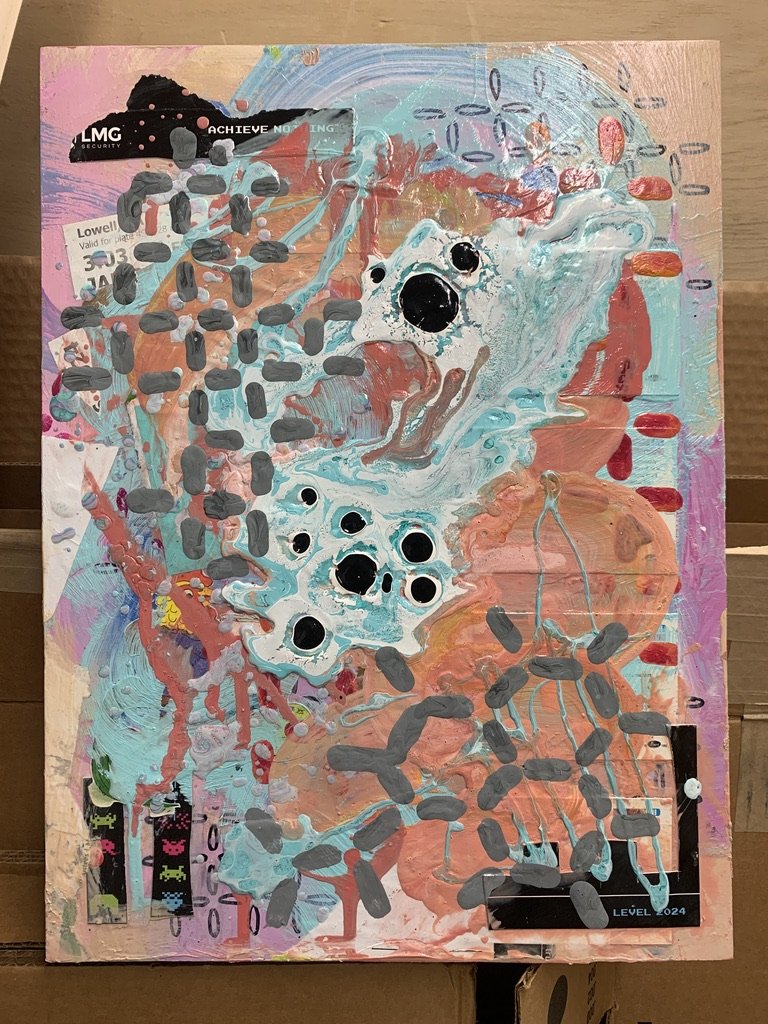
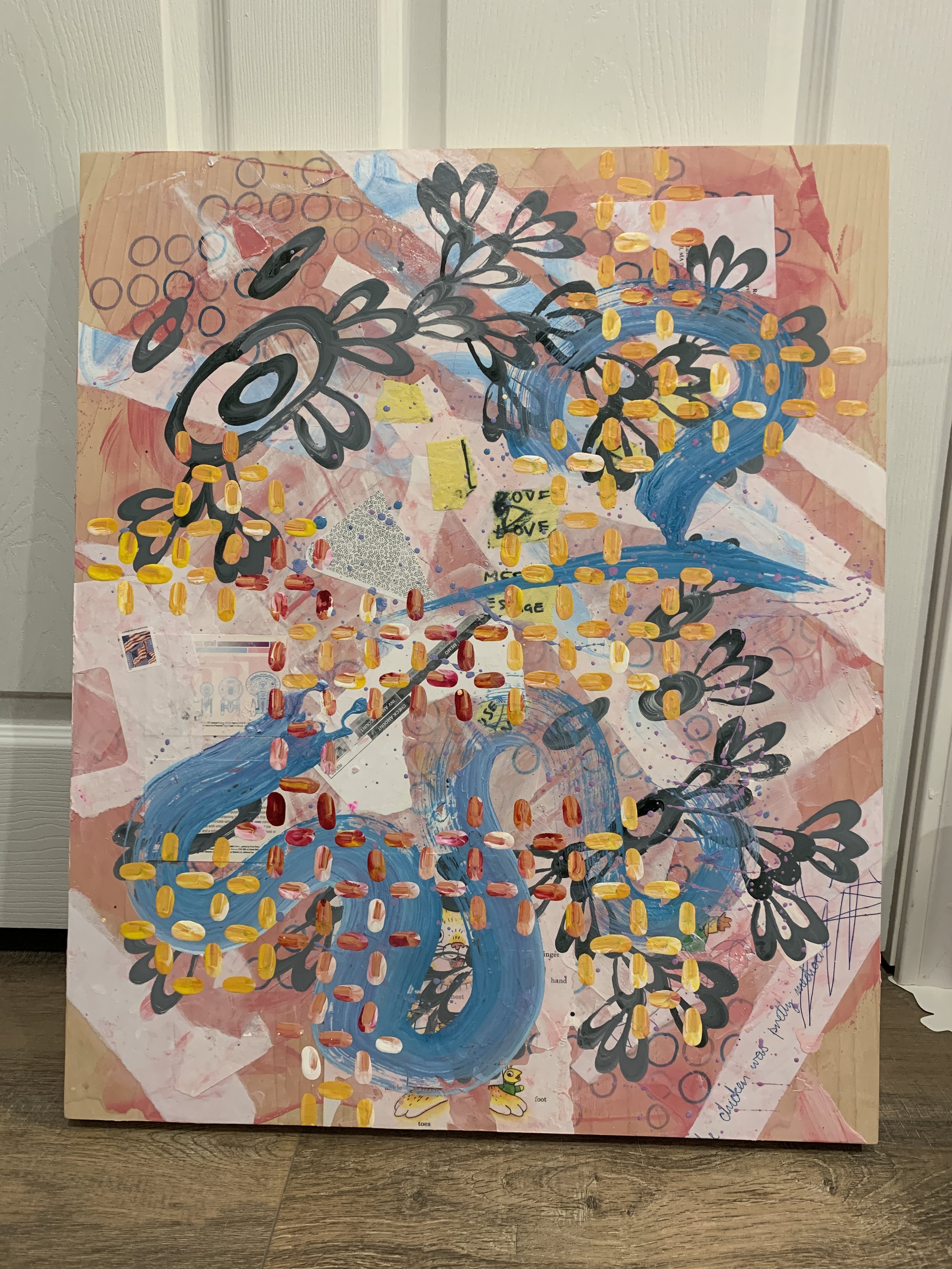
Finally, here’s a quick set of paintings in the queue. Some of these will get motors put on them. Some will not. Some seem pretty done as they are. It’s actually proving to be a little difficult to not “finish” them. I just still like making straight pairings, you know? Nothing wrong with that.




Let me know what you think! I’m getting excited for the show in May!